-표준지도 대신 정밀지도로 정확도 높여
-스마트폰 기반으로 운전자 편의성 도모

넓고 뻥 뚫린 캘리포니아 도로에서 운전을 하다가 상대적으로 좁고 복잡한 우리나라 도로에서 운전을 하면서 많은 위기를 겪었다. 언제 좌회전 차선에 진입해야 하는지 몰라서 2차선에서 직진을 하다가 유턴을 해서 돌아와야 하는 경우도 있었고, 진입로를 놓쳐서 먼 길을 돌아와야 하는 경우도 있었다.
어떻게 하면 편하게 운전할 수 있을까를 고민하면서 거의 모든 내비게이션을 사용해왔다. 자동차 앞유리에 흡착판을 붙여서 사용하는 ‘파인드라이브’부터 현재 사용하고 있는 카카오 내비게이션까지. 지금은 소위 말하는 배테랑 운전자라 괜찮지만, 운전이 익숙하지 않을 때는 내비게이션에 ‘제발 미리 안내해 주든지, 아니면 어느 차선으로 주행해야하는지 안내해달라’고 수도없이 얘기했다.
그런데 당시의 고민을 카카오모빌리티가 해결하고 있는 것으로 확인됐다. 카카오모빌리티에서 측위 기술을 담당하고 있는 서정훈 박사는 현재 인공지능을 이용한 차선단위 내비게이션 ‘VL-Navi’를 개발하고 있다고 밝혔다. <녹색경제신문>은 주행의 안전성과 편의성을 높일 새로운 내비게이션 기술이 소개되는 생생한 현장을 취재했다.

서정훈 박사는 먼저 ‘대전 중구 오거리’의 항공뷰 사진과 로드뷰 사진을 제시했다. 대전 중구 오거리는 도로명에서도 알 수 있듯이 굉장히 복잡한 도로로 직진을 하던 차로에서 다섯 방향으로 주행하게 된다.
이러한 경우 기존 내비게이션은 교차로 이미지를 통해 가야하는 방향을 알려준다. 물론 이 지역이 익숙한 운전자에게는 문제가 되지 않지만, 생소한 운전자들은 잘못된 방향으로 진입할 수 있다. 따라서 복잡한 도로 환경일수록 길안내가 매우 중요하지만 서 박사는 기존 내비게이션으로는 부족하다고 지적했다.
이어 기존 내비게이션은 사고를 예방하는데도 취약하다. 실제로 주변에서 심심치않게 고속도로에서 진출로로 빠져나가야 하는데 이를 놓치고 뒤늦게 차선 변경을 하다가 뒤에 오는 차량과 추돌하는 사고를 볼 수 있다. 교차로에서도 직진 주행을 해야하는데 좌회전 차선으로 진입해 차선을 변경하는 과정에서 추돌사고가 발생하기도 한다.
서 박사는 기존 내비게이션의 한계가 발생하는 이유로 기존 내비게이션에 적용된 표준지도(SD맵)를 꼽았다. 표준지도는 정확한 길안내에 필요한 정보가 부족하고, 오차 범위가 크다는 이유에서다. AR 내비게이션 역시 기존 내비게이션의 정보를 화면에 3차원으로 표시하는 것에 불과해 같은 문제점이 있다는 평가다.

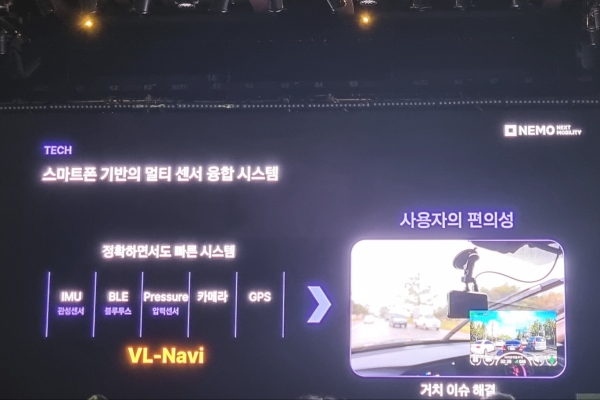
이에 카카오모빌리티측은 스마트폰 기반의 멀티 센서 융합 시스템으로 정확하면서도 빠르게 반응하는 ‘VL-Navi’를 개발했다고 밝혔다. VL-Navi는 카카오모빌리티가 생성한 정밀지도로부터 차선 단위의 경로를 제공한다. 차선 단위의 경로가 제공되면 다양한 센서들을 이용해 멀티센서 융합 시스템을 구축하고, 인공지능을 통해 도로 정보를 알아낸다. 이를 정밀 지도의 데이터와 결합해 차량의 정확한 위치를 파악하고, 이에 따른 정확한 주행 가이드를 제공하는 것이다.
현재 내비게이션에서는 GPS를 사용해 위치를 추정한다. 일반적으로 GPS는 도심에서 최대 수십미터의 오차가 발생할 수 있고, 고속도로에서는 수미터의 오차가 발생할 수 있다. 그렇기 때문에 내비게이션의 성능을 개선하기 위해서는 자율주행 수준의 정확한 위치 추정이 필요하고, 값비싼 센서인 라이더 등과 같은 장비들이 필요하다.
이에 카카오모빌리티측은 스마트폰에서 정확하고 빠르게 위치를 제공하기 위해 스마트폰 기반의 멀티센서 융합 시스템을 구축했다고 밝혔다. 스마트폰에는 유용한 정보를 제공하는 카메라, GPS, 관성센서 등이 탑재돼 있기 때문에 최적의 알고리즘을 개발해 시스템에 적용했다는 것이다.

VL-Navi에 정밀지도(HD앱)이 적용된 점도 눈에 띈다. HD앱은 차선상의 정보를 포함해 더 상세한 정확한 정보를 가진다. 차선, 표지판, 신호, 횡단보도 등 주행에 필요한 정보를 상세하게 담고 있는 것이다.
아울러 정확도를 유지하면서 빠르게 정보를 처리하기 위해 딥러닝 기반의 도로 인식 모델을 개발했다고 전했다.
서정훈 박사는 “정밀지도와 인공지능을 통해 추출한 도로 정보를 결합해 차선 단위의 정확한 위치를 설정한다”면서, “현재 주행하고 있는 차도를 알아내고 위치를 고정하게 되면 정확도를 얻어낼 수 있다”라고 말했다.
이어 “실시간 카메라 등을 통해 추출한 도로 정보를 3차원 데이터로 생성하고, 이를 통해 더 정확한 AI 내비게이션이나 ADAS 기능을 제공할 수 있게 된다”면서, “새로운 내비게이션은 정확성을 유지하고, 주행차로를 사용자에게 직관적으로 제공해 안전한 주행이 가능할 것으로 보인다”라고 덧붙였다.
결과적으로 VL-Navi는 차선 단위 수준의 정확성으로 경로 이탈없이 꾸준하게 길안내를 제공하는 정확성과 사용자의 추가 동작없이 길안내를 제공할 수 있는 편의성, 그리고 주행해야 할 차로를 직관적으로 제공해 안전성을 갖추게 되는 것이다.
박시하 기자 lycaon@greened.kr
